Собакоподобный робот, спроектированный для прыжков по пересеченной местности на других планетах, играет в пинг-понг
(Фото: Cnet)
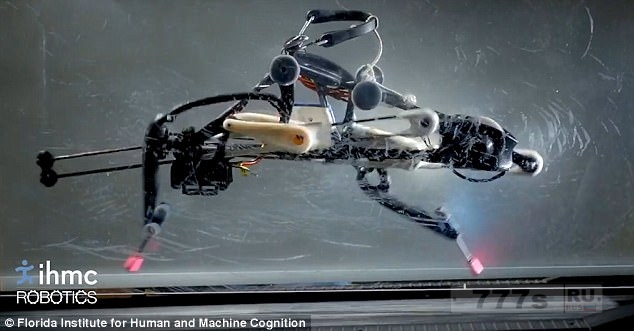
Робот, похожий на собаку, разрабатываемый для того, чтобы прыгать по пересеченной местности на других планетах, использовался для игры в пинг-понг в режиме реального времени на последнем этапе тестирования. Ученые установили SpaceBok сбоку на свободно плавающую платформу, чтобы имитировать среду невесомости в двух измерениях. Они двигались из стороны в сторону с панелью, от которой робот мог отскочить. Колесо реакции помогает роботу стабилизироваться, поворачиваясь на 180 градусов в середине прыжка, чтобы поставить ноги на панель и оттолкнуться на противоположную сторону. Идея проекта заключается в том, чтобы изменить то, как ученые исследуют Луну, астероиды и Марс. Они надеются сделать это, заменив колеса, которые обычно можно увидеть на роверах. Однако колеса могут застрять на скалистых поверхностях, поэтому они решили заменить их на прыгучие ноги. Многогранность ног означает, что его также можно использовать для поиска областей, до которых роверу будет трудно добраться, таких как кратер, пещера или горная местность.
(Фото: Express & Star)
«Причина экспериментов с прыжками заключалась в том, чтобы выяснить, какие виды походки оказываются эффективными в условиях низкой гравитации, например, на Луне», - сказал Хендрик Колвенбах. «Технология динамически шагающих роботов на ножках для наземного применения довольно нова - если вы посмотрите на то, что делают Boston Dynamics, Anybotics и MIT в последние годы - и, следовательно, это то, что мы увидим в космосе только в долгосрочной перспективе». со многими техническими проблемами, которые еще предстоит преодолеть. «Игра в пинг-понг была хорошим способом продемонстрировать способность робота контролировать свое положение и ставить ноги для приземления в крайне низкой гравитации.
 о, Дискус - Форум
о, Дискус - Форум










{kind=link}
{kind=link}